This may well have a much bigger future than obvious. Human beings need access to this when scuba diving which has become much safer and needs an increase in power assited capacity.
Been able to squirt ten feet ahead is useful but more not so. This can all be worked around a bellows on either your back or even stomach. The nozzle can easily be rotated astern or forward or to the sides.
Thus having it on your chest allowing your hands to do the management is sensible and can be ome natural in application.
.
"Squidbot" propels itself with jets of water just like the real thing
By Nick Lavars
October 07, 2020
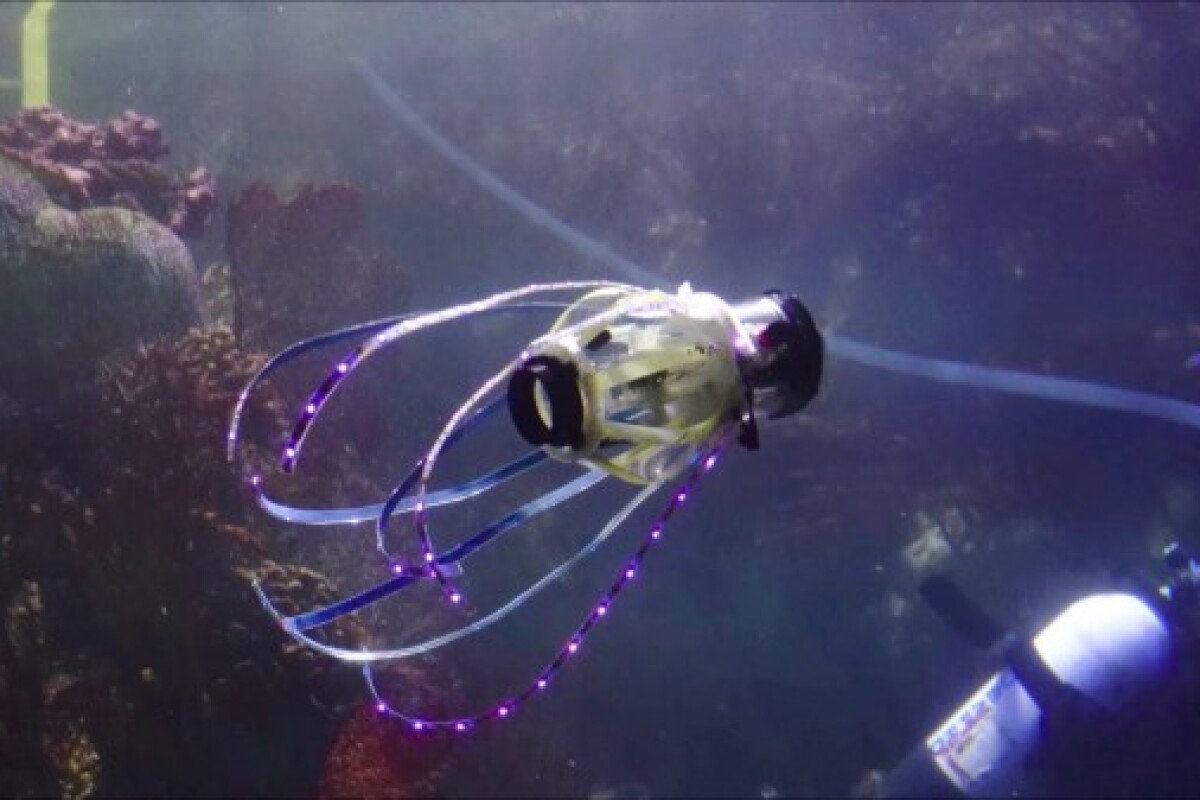
The Squidbot developed at the University of California San Diego
University of California San Diego
When it comes to dreaming up locomotion solutions for advanced robots, scientists regularly turn to the natural world for inspiration, and the marine environment is a particularly rich source of ideas. The latest example of this is a highly efficient “Squidbot” developed by engineers at the University of California (UC) San Diego that uses a combination of soft and rigid materials to propel itself through the water much like the real thing.
The team’s squid-inspired robot is shaped like a paper lantern and is designed to store elastic energy inside its skin and a set of flexible ribs as it takes in water. The ribs are anchored to a pair of circular plates at either end of the body, one drawing in surrounding water via a nozzle and also ejecting it as the soft body contracts.
This action produces jet pulses that propel the robot through the water, much like a natural squid. In effect, this means the Squidbot is able to carry its power source within its body, eliminating the need for a tether. The scientists behind the machine believe it is the first of its kind.
“Essentially, we recreated all the key features that squids use for high-speed swimming,” says Michael T. Tolley, a professor in the Department of Mechanical and Aerospace Engineering at UC San Diego. “This is the first untethered robot that can generate jet pulses for rapid locomotion like the squid and can achieve these jet pulses by changing its body shape, which improves swimming efficiency.”
Another advantage of the design is that the second plate can be loaded up with a sensor or camera to carry out underwater monitoring tasks. Soft robots of this type could find uses in environmental research projects aimed at conserving fish and coral, which could otherwise be damaged by robots with stiffer bodies.

The Squidbot undergoes testing at the University of California San Diego
University of California San Diego
The robot was first put to the test in a waterbed and then in a larger aquarium with other creatures. The Squidbot was clocked at speeds of eight to 32 centimeters per second (0.5 mph or 0.8 km/h), which the team says is faster than most other soft robots. The team also showed that the robot could be steered by altering the orientation of the nozzle.
“After we were able to optimize the design of the robot so that it would swim in a tank in the lab, it was especially exciting to see that the robot was able to successfully swim in a large aquarium among coral and fish, demonstrating its feasibility for real-world applications,” says Caleb Christianson, who led the study.
You can see the Squidbot do its thing in the video below.
This ‘squidbot’ jets around and takes pics of coral and fish
No comments:
Post a Comment